



หุ่นยนต์ตรวจสอบการลาดตระเวนที่แขวน LT-ZXD12 200W




|
รายละเอียดสินค้า:
|
|
| สถานที่กำเนิด: | ประเทศจีน |
|---|---|
| ชื่อแบรนด์: | Topsky |
| หมายเลขรุ่น: | RLSDP 2.0 |
|
การชำระเงิน:
|
|
| จำนวนสั่งซื้อขั้นต่ำ: | 1 |
| รายละเอียดการบรรจุ: | กล่องที่กำหนดเอง |
| เวลาการส่งมอบ: | 30 วัน |
| เงื่อนไขการชำระเงิน: | T / T, L / C, Wester N Union |
| สามารถในการผลิต: | 10sets / เดือน |
|
ข้อมูลรายละเอียด |
|||
| ระดับการป้องกัน: | IP65 สำหรับหุ่นยนต์ทั้งตัว | ขนาด: | 1015mm*กว้าง740mm*สูง425mm |
|---|---|---|---|
| น้ำหนัก: | ≤80kg | กำลังการผลิตไฟฟ้า: | 50kgs |
| ระยะการควบคุมแบบไร้สาย: | 500m | ระยะการควบคุมลวด: | 1000M |
| แสงสูง: | แชสซีหุ่นยนต์ 4 ล้อ ip65,แชสซีหุ่นยนต์ 4 ล้อควบคุมแบบไร้สาย,แชสซี 4 ล้อ ip65 |
||
รายละเอียดสินค้า
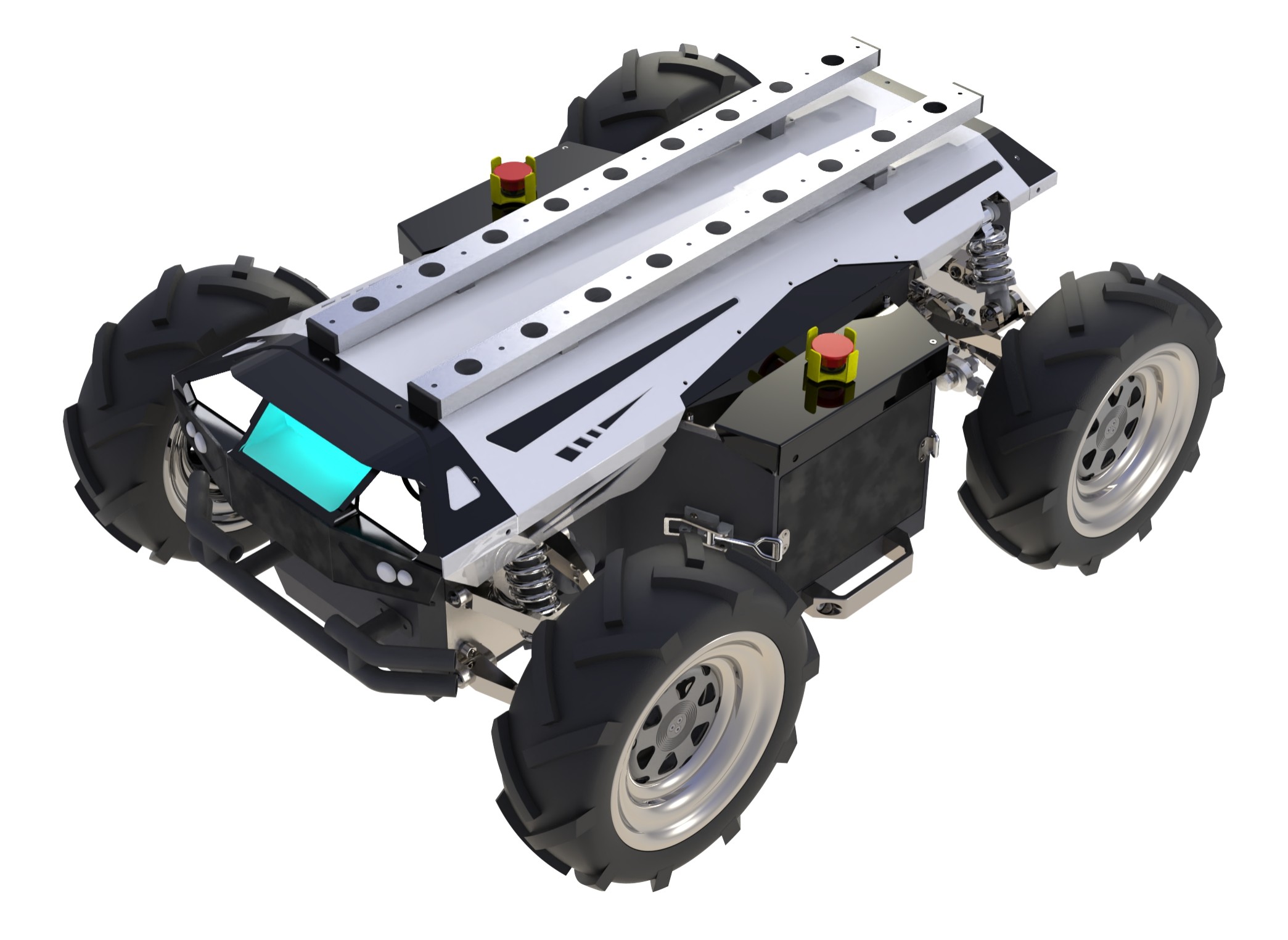
ภาพรวม
แชสซีหุ่นยนต์ล้อ RLSDP 2.0 ใช้แหล่งจ่ายไฟแบตเตอรี่ลิเธียมเป็นแหล่งพลังงานของหุ่นยนต์ ใช้รีโมทคอนโทรลไร้สายเพื่อควบคุมหุ่นยนต์จากระยะไกล และสามารถปรับแต่งโหมดการทำงานที่ซับซ้อนได้ตัวควบคุมหลักมีพอร์ตอนุกรม/บัส CAN มาตรฐานเป็นอินเทอร์เฟซการสื่อสารเครื่องทั้งหมดใช้ระบบบังคับเลี้ยวของ Ackerman และโครงสร้างกันสะเทือนแบบไขว้แขนคู่ด้านหน้าและด้านหลังพร้อมความสามารถในการกันฝุ่นและกันน้ำ IP65 และสามารถทำงานได้ในสภาพแวดล้อมที่ซับซ้อนหลากหลายในเวลาเดียวกัน เครื่องทั้งหมดใช้การออกแบบโมดูลาร์ ระบบกันสะเทือนอิสระสี่ตัว กล่องควบคุมไฟฟ้าซ้ายและขวา และแบตเตอรี่สามารถถอด บำรุงรักษา และเปลี่ยนได้อย่างรวดเร็วสามารถติดตั้งอุปกรณ์ต่างๆ แทนคนเพื่อการทำงานที่มีประสิทธิภาพ
![]()
ขอบเขตการใช้งาน
ใช้ได้กับสวนอุตสาหกรรม ทางหลวง สถานี สนามบิน และสถานที่อื่นๆ
ความกลัว
1. ★ Akerman ความสามารถในการรับน้ำหนักโครงสร้างพวงมาลัย:
2. ★ IP65:
3. ★ประสิทธิภาพการปีนเขา:
4. ★ความเร็วมือถือ:
5. ★การออกแบบโมดูลาร์:
ถอดแบตได้เร็ว
พารามิเตอร์ทางเทคนิค:
3.1 หุ่นยนต์ครบเครื่อง:
1. .0ชื่อ: RLSDP 2-wheel-type robot chassis
2. ฟังก์ชั่นพื้นฐาน: แพลตฟอร์มมือถือ mobile
3. ระดับการป้องกัน: ระดับการป้องกันหุ่นยนต์ที่สมบูรณ์คือ IP65
4. พลังงาน: ไฟฟ้า แบตเตอรี่ลิเธียม
5. DC: 48V
6. ★ ขนาด: ≤ ยาว 1,015 มม. × กว้าง 740 มม. × สูง 445 มม.
7. กลไกการเดิน: wheel-type
8. ข้อกำหนดยาง: 13 * 5-6
9. รูปแบบยาง: ออฟโรด (ถนนที่เปลี่ยนได้, หญ้า)
10. รัศมีการบังคับเลี้ยวขั้นต่ำ: ≥ 1.8m
11. น้ำหนัก: ≤ 73kg
12. ★พิกัดความจุโหลด: 120kg
13. ความเร็วสูงสุดของเส้นตรง: ≥ 2.0m/s
14. ค่าเบี่ยงเบนโดยตรง: ≤ 5%
15. ระยะเบรก: ≤ 0.3m
16. ความสูงของแชสซีนอกกราวด์: ≥ 100mm
17. ★ ความสามารถในการปีนเขา: ≥ 70% (หรือ 35 °) (ยางนอกถนน)
18. ความสูงของแนวขวางในแนวตั้ง: ≥ 120mm
19. ★ความลึกลุย: ≥ 220mm
20. ★ เวลาเดิน: ≥ 2h
21. ระยะการควบคุมระยะไกลไร้สาย: ≥ 100m (เปิด)
3.2 พารามิเตอร์การกำหนดค่าเทอร์มินัลการควบคุมระยะไกล:
1. ขนาดโดยรวม: ≤ความยาว 200mmx กว้าง 210mmx สูง 110 มม. (มีความสูงโยก)
2. น้ำหนักเครื่องสมบูรณ์: 0.7kg
3. แรงดันไฟ (DC): 12V
4. ★ ชั่วโมง: 8 ชั่วโมง
5. ฟังก์ชั่นพื้นฐาน: สามารถควบคุมหุ่นยนต์ไปข้างหน้า ถอยหลัง บังคับเลี้ยว และการเคลื่อนไหวอื่น ๆการรับส่งข้อมูลใช้สัญญาณเข้ารหัสสำหรับการส่งสัญญาณแบบไร้สาย wireless
6. ฟังก์ชั่นการขยาย: การนำทางที่เป็นอิสระ, การวางตำแหน่งแบบเรียลไทม์, การหลีกเลี่ยงสิ่งกีดขวางและการป้องกันการชนกัน
7. ฟังก์ชันควบคุมการเดิน: ใช่ โยกสองตัวตระหนักถึงการหมุนไปข้างหน้า ข้างหลัง ซ้ายและขวาได้อย่างยืดหยุ่น
8. เครื่องมือเสริม: เชือกแขวน
![]()
การกำหนดค่าผลิตภัณฑ์:
1. หุ่นยนต์ล้อ RLSDP 2.0 หนึ่งตัว
2. รีโมทคอนโทรล (รวมแบตเตอรี่): 1 ชุด
3. ที่ชาร์จแบตในรถ (54.6V) 1 วินาที
4. ที่ชาร์จรีโมทคอนโทรล (12V) 1 วินาที
5. คู่มือการใช้งาน หนึ่งใบรับรอง
ป้อนข้อความของคุณ
เส้นทางเทคนิค : เพื่อแก้ปัญหาความปลอดภัยดั้งเดิม
ด้วยเทคโนโลยีที่ไม่ใช่แบบดั้งเดิม
กลุ่มลูกค้า : ความปลอดภัยสาธารณะและความปลอดภัยการผลิต
| Beijing Topsky Century Holding Co.,Ltd |
| 10B NO.17 HuanKe Middle Road Jin Qiao ฐานอุตสาหกรรม Tongzhou District ปักกิ่งประเทศจีน 101102 |
| 86-10-5762-1296 |
| sale2.ex@topskytech.com |